Projects and Experience
For more details, kindly have a look at my CV or reach out to me.
Gait Event Detection
Developed a rule-based algorithm that detects gait events on different terrains using data from IMUs. See project publication for details.
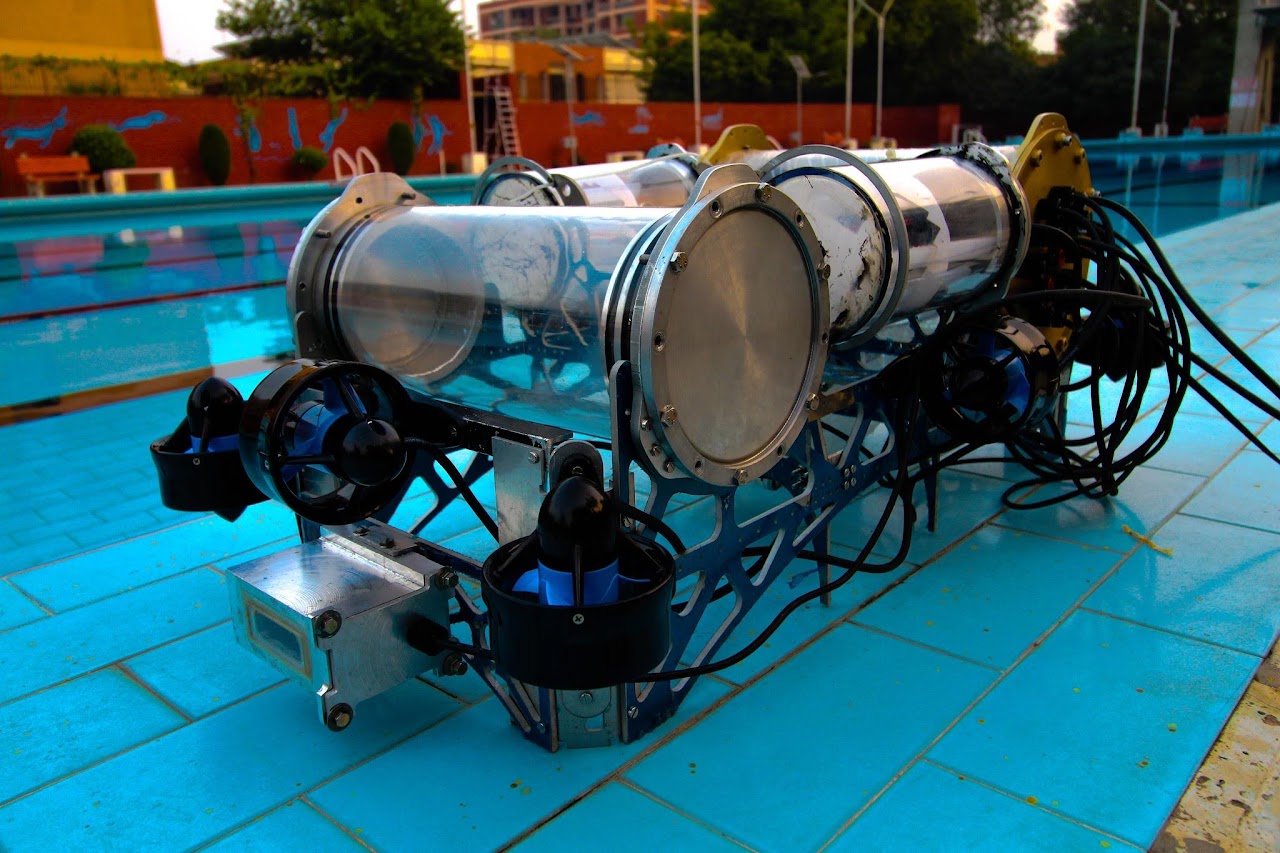
Autonomous Underwater Vehicle (AUV)
Part of the student team that worked on development of AUV. For more details, visit the team page.

No Time To Fly (ME218A)
Developed a game as a part of course projectc for ME218A - Mechatronics at Stanford. For more details, visit page.
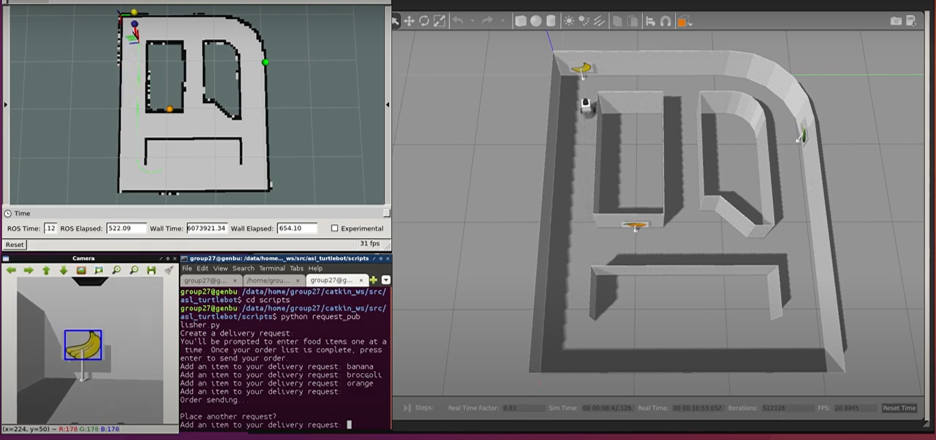
Delivery Robot
Implemented autonomous exploration, A-Star, TSP, gmapping SLAM on a Turtlebot using ROS (Python) for navigation in a mock environment. For more details, visit page.

Robotic Cooking Machine
Worked with a Bengaluru based robotic startup as a Robotic Engineer Intern and redesigned one of their cooking machine. To know more about the company, click here.

Software Engineer
Worked as a application developer with one of the leading financial instituion in India, Bajaj Finserv Limited. To know more about the company, click here.
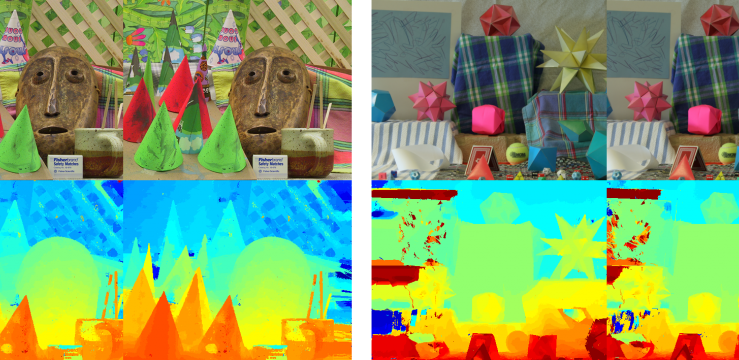
Depth Map From Stereo Images
Developed a ROS compatible implementation of Kanade’s stereo matching algorithm as a solution to assign window size for block matching in stereo vision using SSD. For code click here.
Contact
Please feel free to reach out!
- mssaboo@stanford.edu
- Stanford, CA